- Joined
- Sep 5, 2003
- Messages
- 1,967
This week’s Nature contains a brief article describing some observations of octopus fetching movements made by the “Octopus Group” at Hebrew University. After an octopus has grasped a tasty morsel in one of its arms, it often transfers the item to its mouth using a movement reminiscent of articulated appendages. Here’s what happens (sorry if this is a bit clunky):
First, the food item is grasped at some point on the arm. Next, the octopus stiffens the arm into a “quasi-articulated” structure resembling three segments and three “joints”—sort of like your arm. The prey is grasped in the part that corresponds to your hand, which we’ll call the distal segment. The next segment towards the body, what would be your forearm, we’ll call the medial segment. Between these two segments, the octopus forms a bend (the distal bend) which functions as the “wrist”. The last segment, closest to the octopus’s body, is called the proximal segment and corresponds to your upper arm. The octopus forms another bend (the medial bend) between the medial and proximal segments, and this acts pretty much like your elbow. The last joint, the “shoulder” or proximal bend, occurs at the base of the arm. The fetching motion consists mainly of a rotation around the medial bend which brings the distal segment close to the base of the arm, followed by a rotation around the distal bend that brings the food item to the mouth for munching. The researchers observed that:
Isn’t that neat? The octopus could bring the food to its mouth in an enormous number of ways, given the freedom of motion of its arms, but it actually does so in a “simple” way that resembles the motion used by an animal burdened with a skeleton (internal or external). Here’s what the authors had to say about that:
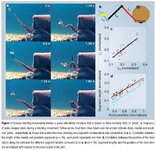
Anyway, here’s a figure that might help you to understand what the heck I was trying to say:
L1 = length of proximal segment
L2 = length of medial segment
L3 = length of distal segment
All of this courtesy of: Sumbre G, Fiorito G, Flash T, Hochner B (2005). Motor control of flexible octopus arms. Nature 433:595-596.
And here’s a movie of a wunderpus’s fetching behaviour:
Small (~1.3 MB)
Large (24 MB)
First, the food item is grasped at some point on the arm. Next, the octopus stiffens the arm into a “quasi-articulated” structure resembling three segments and three “joints”—sort of like your arm. The prey is grasped in the part that corresponds to your hand, which we’ll call the distal segment. The next segment towards the body, what would be your forearm, we’ll call the medial segment. Between these two segments, the octopus forms a bend (the distal bend) which functions as the “wrist”. The last segment, closest to the octopus’s body, is called the proximal segment and corresponds to your upper arm. The octopus forms another bend (the medial bend) between the medial and proximal segments, and this acts pretty much like your elbow. The last joint, the “shoulder” or proximal bend, occurs at the base of the arm. The fetching motion consists mainly of a rotation around the medial bend which brings the distal segment close to the base of the arm, followed by a rotation around the distal bend that brings the food item to the mouth for munching. The researchers observed that:
- The lengths of the proximal and medial segments remained essentially constant during the fetching movement;
- The lengths of the proximal and medial segments were close to being equal;
- The length of the distal segment tended to shorten as the movement progressed;
- The lengths of the medial and proximal segments varied according to the location on the arm at which the item was initially grasped.
Isn’t that neat? The octopus could bring the food to its mouth in an enormous number of ways, given the freedom of motion of its arms, but it actually does so in a “simple” way that resembles the motion used by an animal burdened with a skeleton (internal or external). Here’s what the authors had to say about that:
Fetching seems to be an example of evolutionary selection of solutions that are similar even though they are based on quite different mechanisms — on morphology in arthropod and vertebrate limbs, and on stereotypical motor control in the octopus. This functional convergence suggests that a kinematically constrained, articulated limb with two segments of almost equal length is the optimal design for accurately moving an object from one point to another.
Anyway, here’s a figure that might help you to understand what the heck I was trying to say:
L1 = length of proximal segment
L2 = length of medial segment
L3 = length of distal segment
All of this courtesy of: Sumbre G, Fiorito G, Flash T, Hochner B (2005). Motor control of flexible octopus arms. Nature 433:595-596.
And here’s a movie of a wunderpus’s fetching behaviour:
Small (~1.3 MB)
Large (24 MB)
 Good old O. vulgaris, the completely classless octopus.
Good old O. vulgaris, the completely classless octopus. 
